
|
 |
||||
I completed the wiring of the autopilot today. Both the pitch and roll servos were wired correctly. I was also able to verify the autopilot was getting valid GPS data from the Garmin 430W and valid ARINC 429 data from the 430W. However, the TruTrak wouldn't recognize the ARINC output from the TruTrak. I went into the ARINC setup page and there are two choices for the output ARINC - Low or High speed. The High speed was selected. Just for fun I changed it to low speed. Voila - the TruTrak saw the ARINC data from the GRT EFIS. However, the 430W was now complaining it didn't see the ARINC feed from the EFIS. I went into the setup of the 430W and set it to accept low speed ARINC from the EFIS. All was finally well in communications land!  The last part of the autopilot installation was plumbing the pitot and static ports. 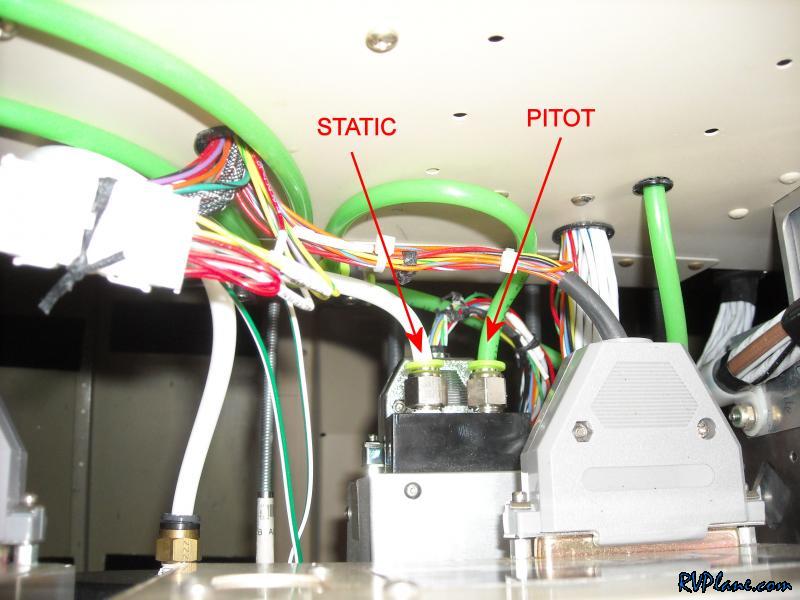 The winds were lower than expected today, so I decided to go for a quick flight to check out the autopilot. While waiting for the engine to warm up I saw this chopper hovering over the runway.  I turned on the autopilot's roll servo's and all the sudden I was going straight. I then turned on the pitch functionality and I leveled off! Way cool! I could change the course on the autopilot and the RV would turn. Now let's get greedy and see if the autopilot will track the course on the GPS. When I set the autopilot to follow GPSS, it made a drastic course change. After I played with it a little, I realized the EFIS was sending it other course information - not my GPS course (probably in my VOR). Once I got all the settings right, the autopilot followed the course in the EFIS perfectly! It was way too cool!  The autopilot doing its job. What a nice upgrade to N987MB! On the way back I managed to make two of my better landings in the RV as I was doing some touch and go's. 
|
|||||
|
http://RVplane.com |
Last Modified: January 31, 2026 |